



Baubericht eines DJI F450 E300
von Wolfgang Zeiger
Hier möchte ich mal den Aufbau meines DJI F450 E300 zeigen. Vielleicht bekommt ja der eine oder andere auch Lust, so einen Kopter zusammenzubauen. Ist wirklich keine Hexerei. Der E300 wird mit anderen Motoren und Reglern als der Alte F450 geliefert. Ebenso sind die neuen Propeller vom Phantom V2 verbaut. Bestellt habe ich ein Set mit NAZA-lite bei MHM für 229€.
hier der Baubericht des DJI F450 E300 als PDF
und ein netter Zeitungsbericht im Hellweger Anzeiger von 2014
Wie man auf den Bildern sieht, sind es nicht allzu viele Teile.
Weiterhin werden noch folgende Teile benötigt.
- Lötkolben oder besser Lötstation und gutes Lötzinn.
- Ein Gerät zum Abisolieren der Kabel, scharfes Messer, und vielleicht bessere
- Sechskanntschlüssel als die beiliegenden.
- Diverse Kleinteile wie Schrumpfschlauch, Kabelbinder, Klettband, schwarzes Isolierband und
- Stecker für die Stromversorgung nach Wahl
- Eine Fernsteuerung mit Empfänger mit mindestens 6 Kanälen.
- Lipo Akku 3S-4S. Ich empfehle jeweils min. 5000mAh für annehmbare Flugzeiten.
- Ein PC oder Laptop mit Internetanschluss.
Ebenso empfehle ich die Videos von Arthur Konze und sein Kopter-Forum. Hier habe ich sehr viel über Kopter gelernt.


Da DJI bei den neuen E300-Reglern kein separates Minuskabel mehr verbaut, ist es nötig bei dem schwarzen Kabel am Ende die Ummantelung etwas zu entfernen, da die als Minuskabel gedachte Netzummantelung sehr kurz geraten ist. Dabei darf Diese nicht beschädigt werden. Ebenfalls ist bei der nachfolgenden Verzinnung darauf zu achten, das die Isolierung des roten Pluskabels nicht beschädigt wird. Am Stromeingang kann zusätzlich noch ein Kabel mit BEC Stecker für spätere Stromabnehmer wie Gimbal, Beleuchtung etc. mit angelötet werden.
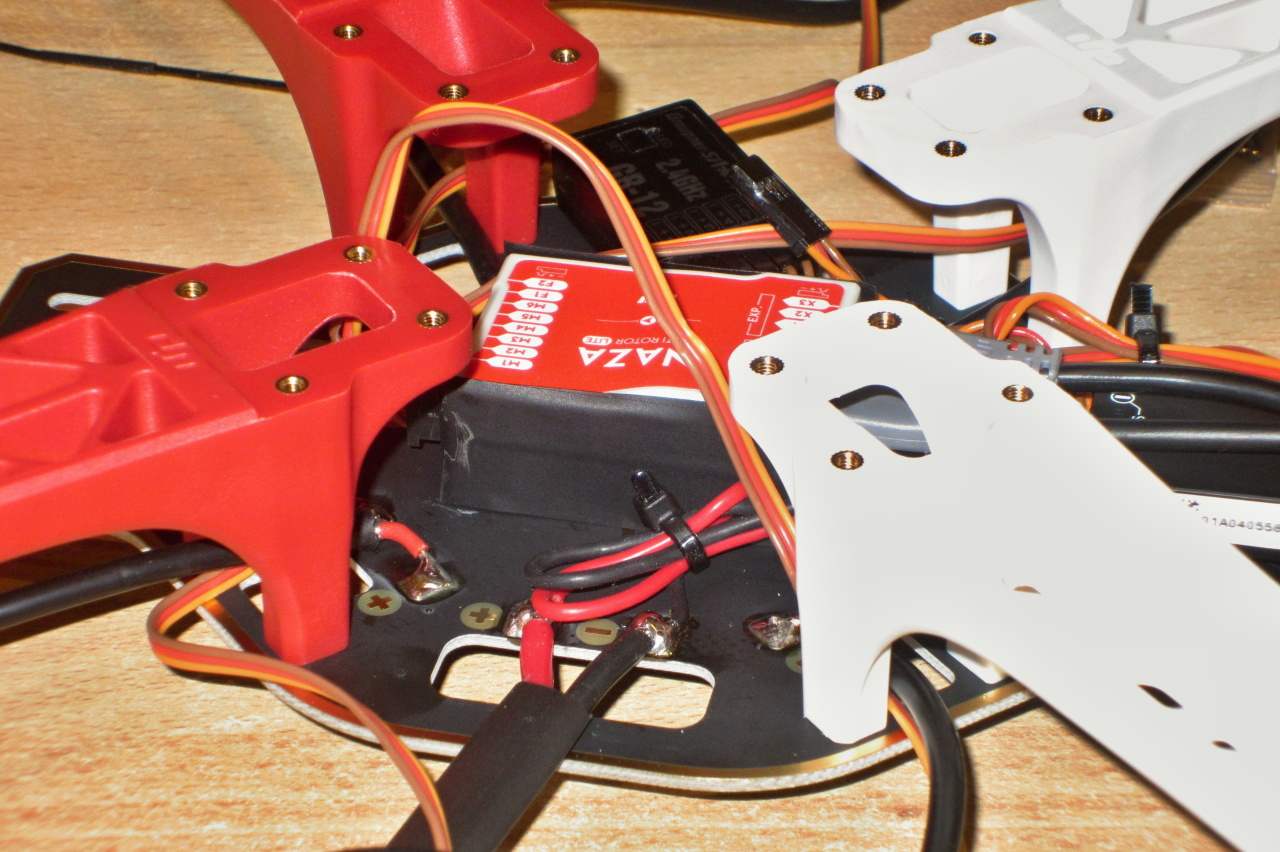
Das Gehäuse der NAZA-Lite sollte nun mit schwarzem Klebeband an den Seiten versehen werden. Wie sich herausgestellt hat, wirkt das dem späteren plötzlichen Höhenverlust des Kopters entgegen. Anschließend wird die NAZA genau mittig auf der Grundplatte mit den beiliegenden Klebepads befestigt. Hierbei ist der kleine Pfeil auf dem Gehäuse nach der späteren Front des Kopters auszurichten. Danach die Kabel der Regler und des Empfängers in der richtigen Reihenfolge an der Naza anschließen und die Kabel verstauen.
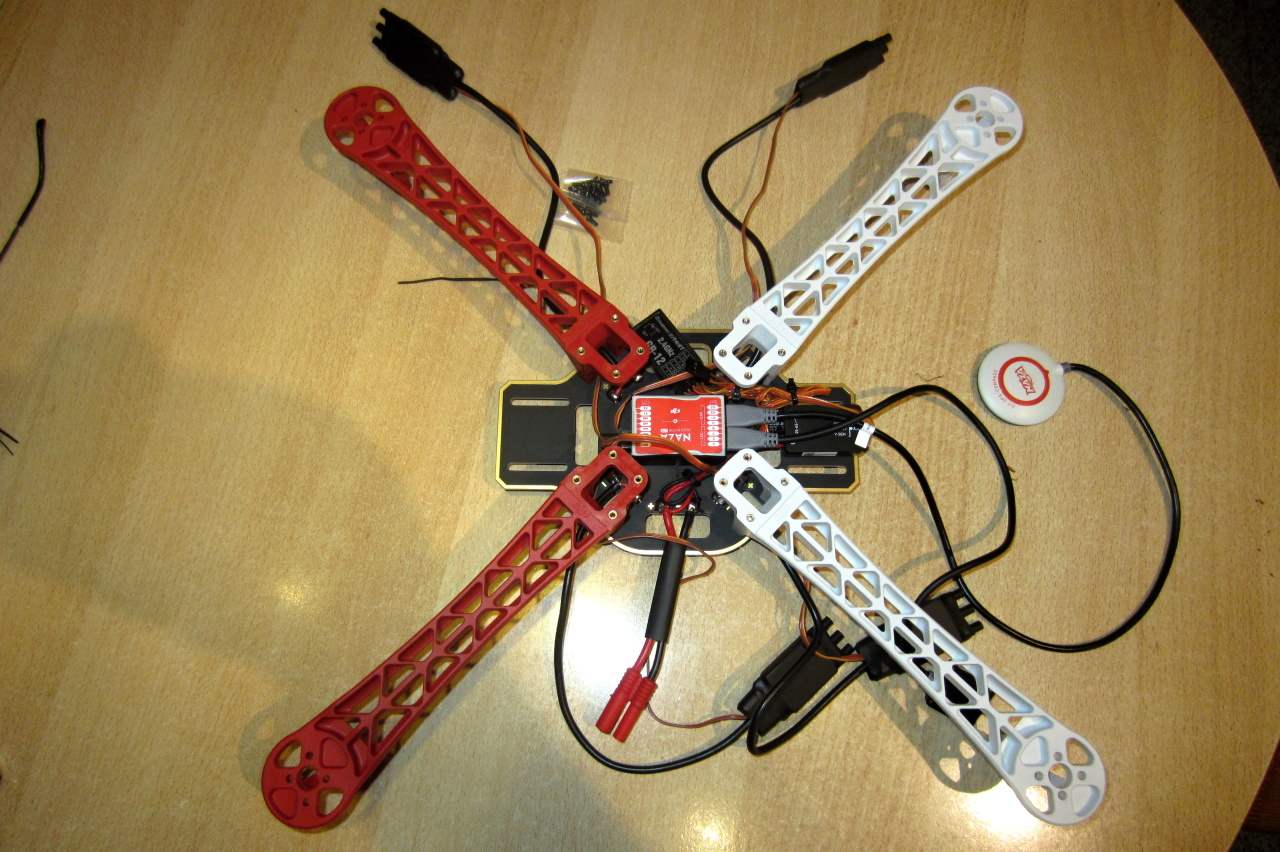


Als Nächstes werden die Arme mit der Grundplatte verschraubt, und die Motoren montiert. Hierbei ist jetzt schon darauf zu achten, dass sie an der richtigen Stelle sitzen, da sie ein Rechts- bzw. Linksgewinde haben. Die Kabel der Motoren können erstmal in beliebiger Reihenfolge an die Regler gesteckt werden. Diese werden dann unter den Armen befestigt.

Zum Schluss noch die obere Platte verschrauben, und den GPS Pilz anbringen. Dabei muss der kleine Pfeil auf dem Pilz genau in Flugrichtung zeigen.
Dann muss der Sender für den Einsatz mit dem Kopter eingestellt werden.
Dazu zunächst im Sender einen neuen Modellplatz als Flächenmodell anlegen. Ich habe mir das einfacher gemacht, indem ich eine für meine Graupner MX 12 Hott passende Datei aus dem Netz geholt habe und eingespielt habe.
Für andere Sender gibt es genügend Anleitungen im Netz. Im Prinzip geht es darum, drei Schalter in dem Sender zu programmieren, die die Naza-Lite jeweils in die entsprechenden Zustände wie GPS,ATTI,Manuell sowie Courselock, Homelock und manuellem Failsafe schaltet. Dazu sollte der Sender sinnigerweise über zwei Dreistufen- (GPS,ATTI,Manuell) (off,CL,HL) und einem Zweistufenschalter (Failsafe on, off) verfügen. Dann noch Sender mit Empfänger binden, und die Failsafefunktion je nach Sendertyp programmieren.
Nun geht es daran, den Kopter mit einer Software einzurichten.
Die benötigten Treiber und Software bekommt ihr hier. Treiber und Software auf dem PC oder Laptop installieren.
Funke einschalten, Kopter mit Strom versorgen (wichtig: ohne Propeller). Abwarten, bis die LED mehrfach schnell hintereinander grün geblinkt hat, und dann den Kopter mit einem passenden USB-Kabel mit dem PC verbinden. Abwarten, bis die Gerätetreiber-Installation abgeschlossen ist. Dann erst die Software aufrufen. Beim ersten Aufrufen der Software, wird man meiner Erinnerung nach noch aufgefordert, sich bei DJI zu registrieren. (gültige E-Mail Adresse erforderlich) Daher die ganze Prozedur nur an einem PC oder Laptop mit Internetzugang machen. Bei späteren Einstellungen am Kopter ist der Internetzugang nicht mehr erforderlich.
Wenn alles nach Plan gelaufen ist, erscheint folgendes Bild und die blaue Lampe unten links in der Software sollte blinken. Ebenfalls sollte die LED am Kopter in ein dauerhaftes kräftiges Grün übergegangen sein.
Dann als Erstes die Funke in der Software kalibrieren. Dazu den Reiter Basic und RC anklicken.

Da ich alles traditionell verkabelt habe, ist bei mir ein blauer Punkt neben Tradition. Wird die Naza anders mit dem Empfänger verbunden, ist der Kreis neben der entsprechenden Anschlussart zu markieren. Dann neben Calibration auf Start drücken und beide Sticks mehrmals in alle Ecken im Kreis bewegen. Ebenfalls alle Schalter und Potis in die jeweiligen Endstellungen und wieder zurück bewegen.
Nun schauen ob alle Schalter und Knüppel richtig reagieren. Wenn die Sticks in Mittelstellung stehen, sollten die Reiter in der Mitte stehen und grün sein. Werden die Sticks nun nach oben, bzw. nach rechts bewegt, sollten die Reiter nach rechts gehen. Wenn nicht, sind die Kanäle von Norm auf REV zu setzen.
Nun noch den Schalter für GPS, ATTI,Manuell durchschalten. Der Reiter bei U sollte nun unter den entsprechenden Feldern einrasten, und das entsprechende Feld blau werden. Wenn nicht, sind die entsprechenden Werte im Sender anzupassen. Genauso verhält es sich bei dem manuellen Failsafe-Schalter. Bei betätigen dieses Schalters sollte, egal wie die anderen Schalter stehen, in der Software immer Failsafe angezeigt werden. Entscheidend dabei ist, was in der Software im unteren Teil hinter MODE: steht.
Nun rufen wir noch die anderen Reiter in der Software auf.
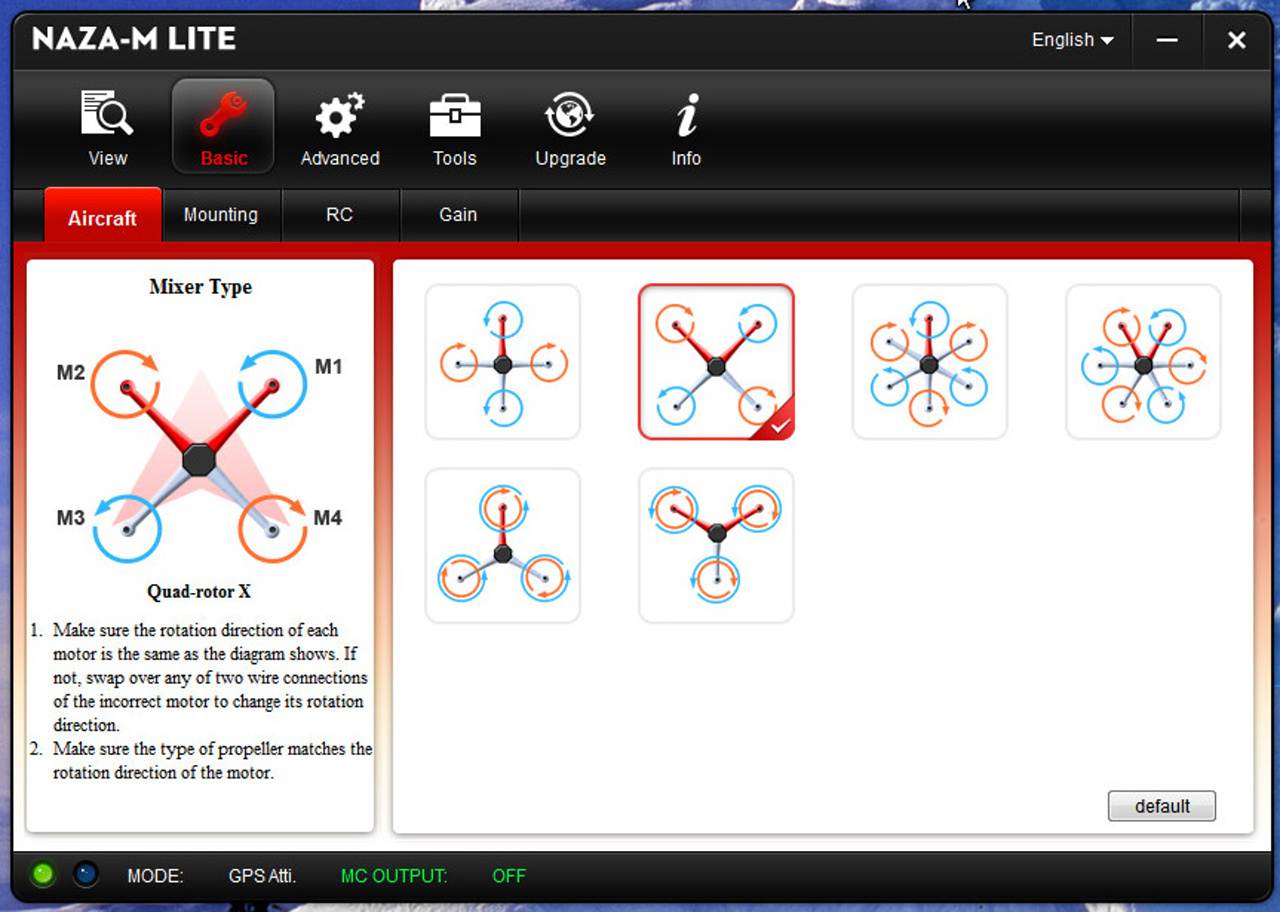
Unter Airkraft schauen wir ob das richtige Koptermodell markiert ist. In meinem Fall Quad-rotor X. Im Bild links sieht man die richtige Drehrichtung der einzelnen Motoren und die Flugrichtung. Dementsprechend müssen auch die Regler mit der Naza an den Eingängen M1-M4 angeschlossen sein.
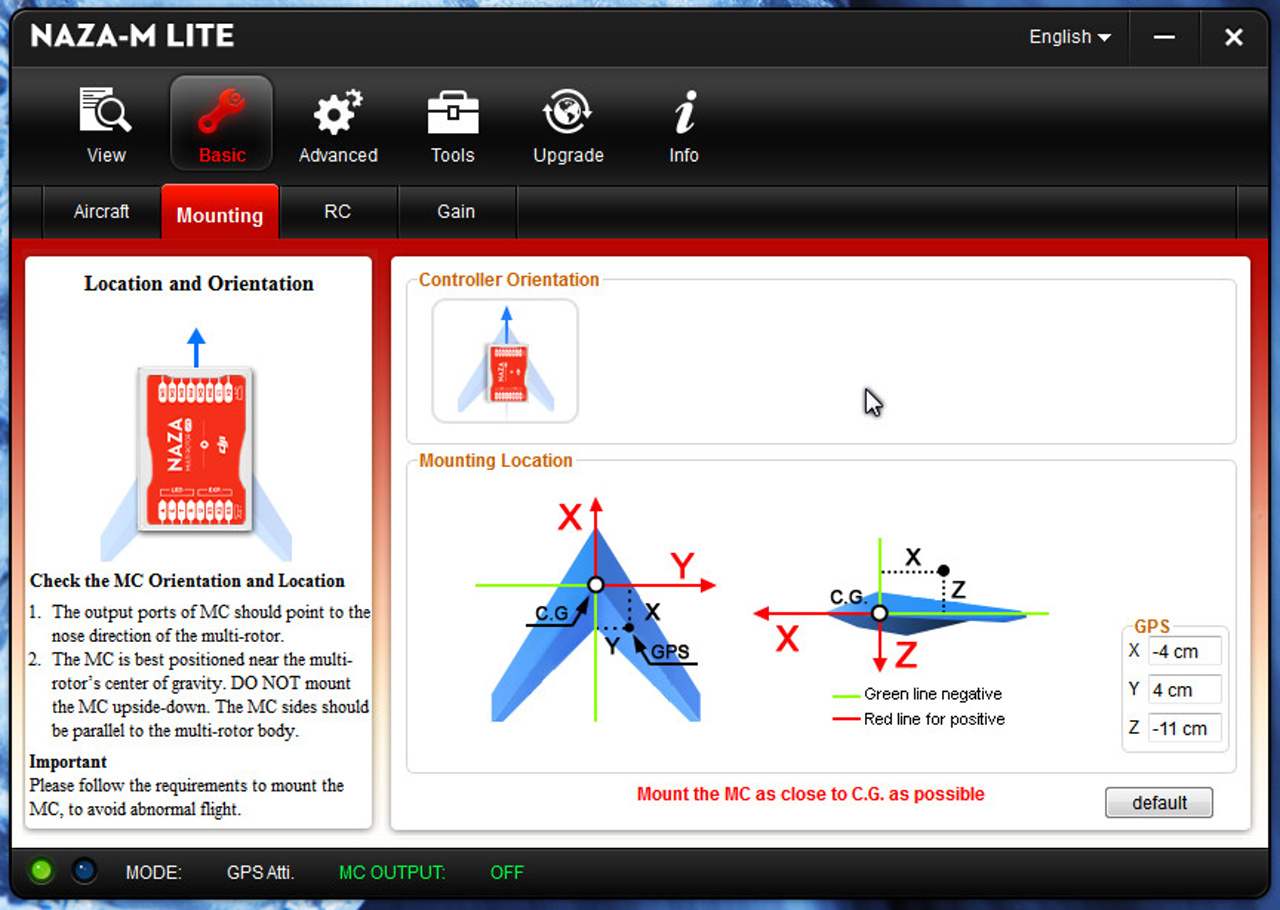
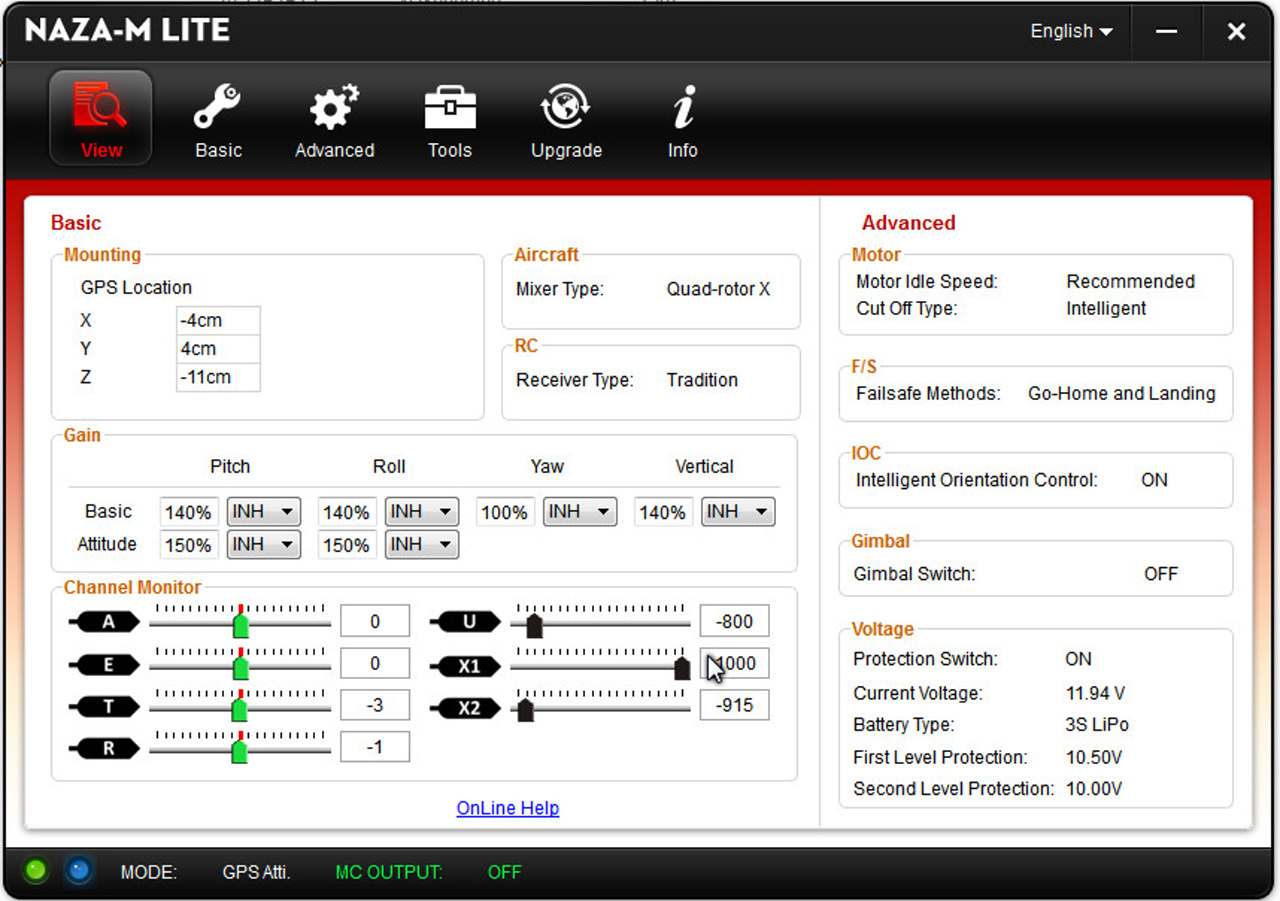
Unter Mounting müssen wir noch die Lage des GPS-Pilzes zur Naza eintragen.
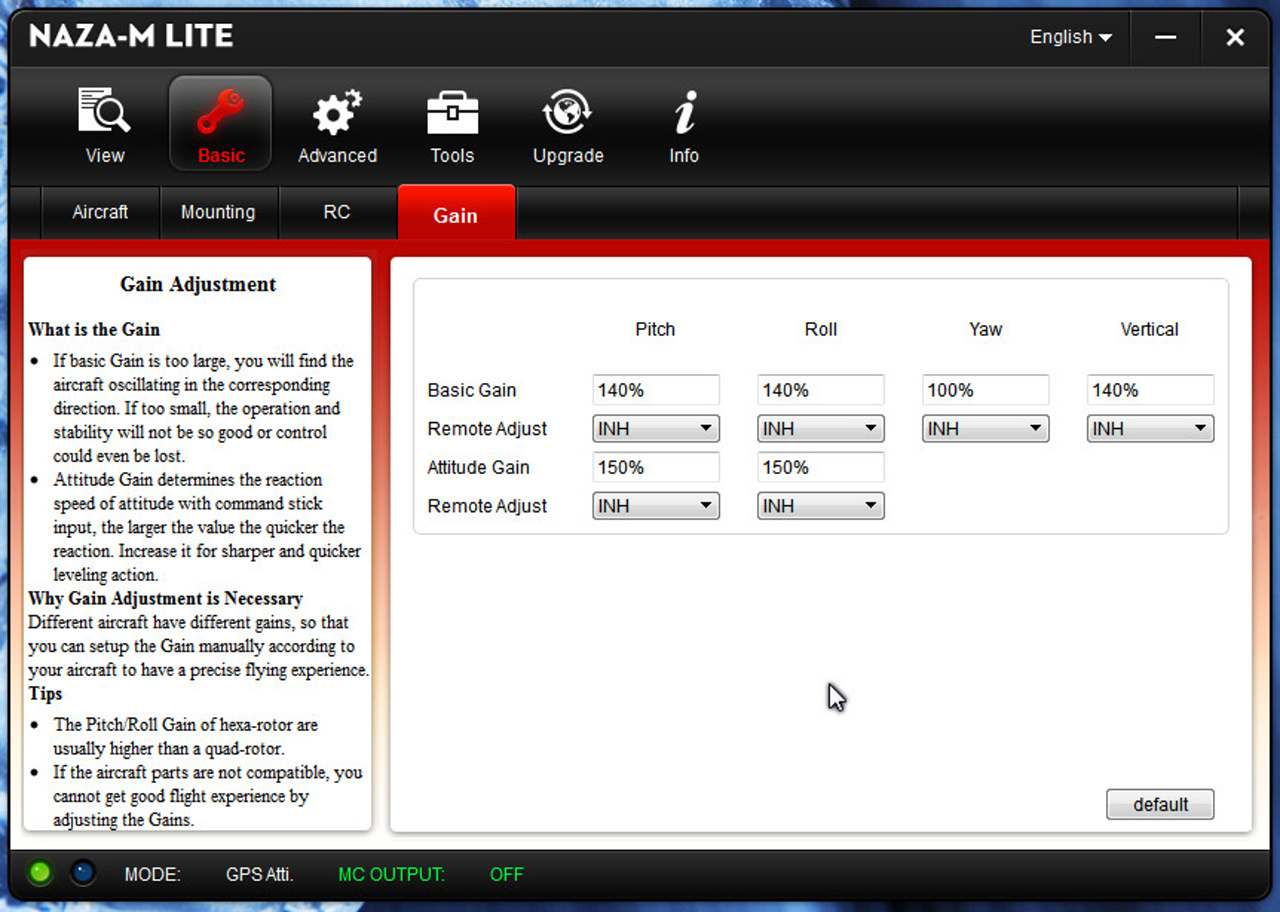
Unter Gain stellt man dann einige Erfahrungswerte ein. Meine sind die im Bild zu sehenden. Die Gainwerte sind aber auch abhängig von verschiedenen Faktoren. (Gewicht, Größe, Motoren, Propeller, Flugakku des Kopters, den Windverhältnissen und nicht zuletzt von den eigenen Bedürfnissen, wie sich der Kopter im Flug verhalten soll) Gainwerte, muss sich jeder Pilot selbst erarbeiten.
Nun der Reiter Advanced.
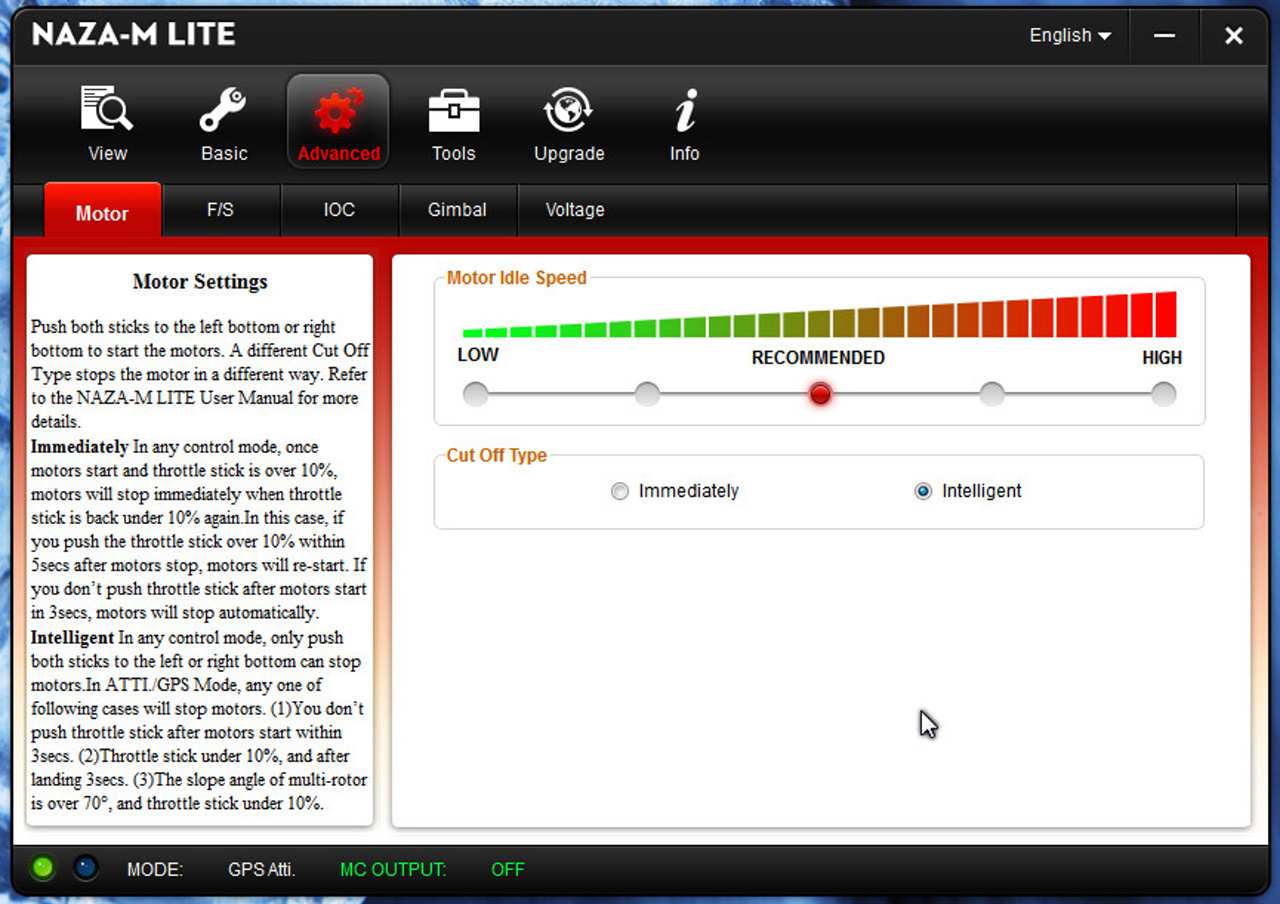
Unter Motor finden wir zwei Einstellungen. Motor Idle Speed und Cut OFF Type. Ersterer steht für das Startverhalten der Motoren. Wenn der zu niedrig steht, kann es passieren, das die Motoren nicht gleichzeitig anlaufen und der Kopter sich im Stand auf den Rücken dreht, wenn man nicht richtig reagiert. Der zweite Wert, ist dafür verantwortlich, wie der Kopter reagiert, wenn man den Gasstick ganz nach unten zieht, und dort länger als 3 sek lässt. Eine englische Beschreibung steht jeweils im linken Teil des Fensters. Einfach gesagt: Immediately = Stick mehr als 3 Sek unten, Motoren gehen aus und Kopter stürzt ab. Intelligent = Motoren gehen nicht aus, solange der Kopter seine Höhe ändert. Erst wenn er nicht mehr sinkt, gehen die Motoren aus, wenn der Gasstick für mehr als 3 Sek unten gehalten wird.

Unter F/S finden wir die Einstellung, was der Kopter machen soll, wenn der Failsafe Modus zum Tragen kommt.
Landing = Er landet an der Stelle wo er gerade ist.
Go-Home and Landing = Der Kopter steigt auf 20m Höhe, wenn er in einer Höhe unterhalb von 20m ist, kommt zum Startpunkt zurück, und landet dann. Ist er in einer Höhe von mehr als 20m, bleibt er in dieser Höhe, kommt zurück und landet dann.

Unter IOC könnt ihr den Schalter für IOC überprüfen. Der Reiter muss je nach Schalterstellung unter dem jeweiligen Feldern einrasten, und das entsprechende Feld wird blau.
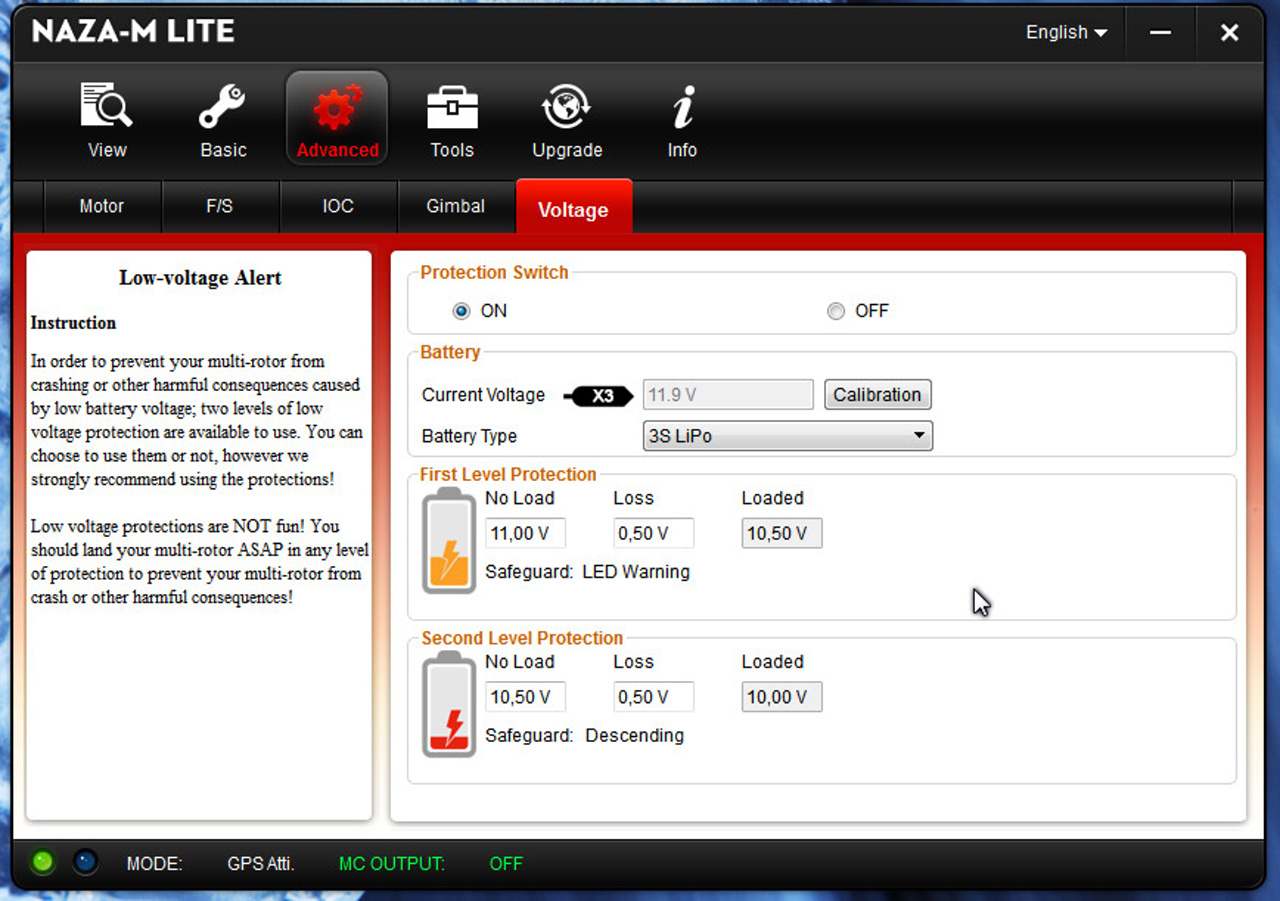
Unter Voltage wird der jeweilige Wert eingestellt, wann die Naza LED anzeigt wieviel Volt der Flugakku noch hat. Beim Second Level Protection Wert beginnt der Kopter selbständig zu landen. Nach einer gewissen Zeit reagiert der Kopter auf keine Steuerungsbefehle mehr. Damit mir das nicht passiert, habe ich einen Lipo-Warner an meinem Kopter angebracht, und die Voltage-Werte ziemlich niedrig eingestellt. Man könnte die Überwachung auch ganz ausschalten.
Nun kommen wir noch zu einem ganz wichtigen Reiter in der Software.
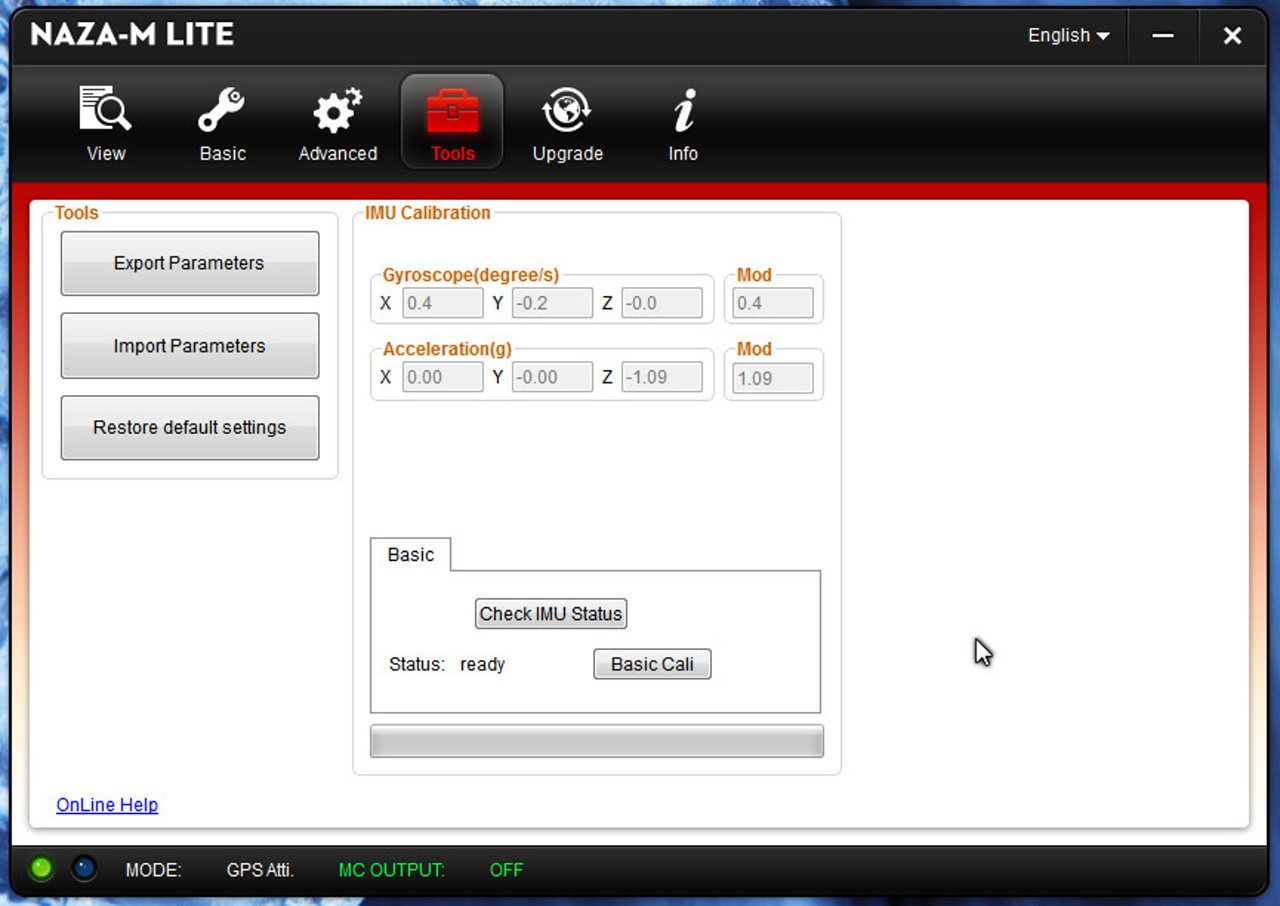
Dem Reiter Tools. Hinter ihm befindet sich die IMU Calibration.
Diese muss in jedem Fall vor dem ersten Flug gemacht werden.
Dazu stellt man den Kopter auf eine möglichst ebene Fläche. Ich bin dafür mitsamt Kopter und Laptop in die Küche gewandert, und habe den Kopter auf das Ceranfeld (natürlich ausgeschaltet) gestellt. Dieses sollte ja so ziemlich in der Waage sein. Sender einschalten, Kopter mit Strom versorgen. Das schnelle Blinken abwarten, und danach noch mindestens 10min warten. Kopter mit PC verbinden, ohne ihn großartig zu bewegen. IMU Calibration mit Basic Cali starten wenn Status: ready angezeigt wird. Nach ein paar Sekunden werden die Werte angezeigt, und sollten bei Gyroscope einen Mod Wert von möglichst 0 anzeigen, und für Acceleration einen Mod-Wert von 1.
Danach PC vom Kopter trennen. Nun können wir die Laufrichtung der Motoren überprüfen und gegebenenfalls durch Umstecken von zwei der drei Kabel berichtigen. Anschließend kann der Rest angebaut werden.
Bevor man den ersten Flug unternimmt, muss noch der Kompass auf freiem Feld kalibriert werden. (siehe Anleitung) Wichtig ist dabei, dass man keinerlei metallische Gegenstände oder WLAN Geräte in der Nähe hat. Also Schlüssel, Uhr und Handy ablegen und ein freies Feld suchen.

